土壤养分分析对
磁力搅拌器提出了较高的要求。比如 ,磁棒转速稳定度高 ,且连续可调;液体温度稳定度高,且连续可调 ;定时准确, 且连续可调等。
为了稳定磁棒转速,采用霍尔接近开关直接检测磁棒转速, 每转一圈 ,接近开关产生一个脉冲信号, 单片机将磁棒实际转速与设定转速进行比较, 通过软件 PID 控制, **终使磁棒转速稳定在设定值。硬件框图如图 1 所示。磁棒转速控制的特点:
(1)由于惯性和液体阻力的原因, 如电机启动转速太快, 磁棒将跟不上电机旋转 ,出现启动失败。
(2)由于磁极间的引力 ,使磁棒与三角瓶之间的静摩擦较大, 克服静摩擦而起转后 , 转速突然上升, 可能产生超调。
(3)若磁棒受阻而减速(比如与瓶体碰撞), 一旦滞后大于 180 度 , 就会丢失一个脉冲,造成检测错误。
根据上述特点, 采用积分分离 PID 算法,并加入数字滤波及转速缓升控制 ,PID 算式如下 :
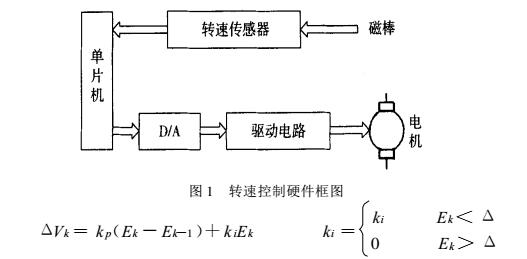
设给定转速为 Ng ,则给定的旋转周期为:Tg =60000/Ng(m s);设第 K 圈的周期为 T k ,则第 k 次误差为 :Ek =Tg -Tk (ms)。Ek -1为第 K -1 次误差,kp 为比例系数 ,ki 为积分系数, Vk 为第 K 次电压增量。
磁力搅拌器刚启动时, 误差较大(Ek >Δ), 为防止启动转速太快造成启动失败, 此时取积分系数 ki =0(积分分离),而采用转速缓升控制, 使磁棒转速逐步升高 。当磁棒转速接近给定值 (Ek <Δ),加入积分作用,以保证稳态精度 。由于每转一圈采一次样 ,调整一次 ,因此调整过程很快 ,转速稳定性和动态性能都很好。