土壤养分分析对
磁力搅拌器提出了较高的要求。比如 ,磁棒转速稳定度高 ,且连续可调;液体温度稳定度高,且连续可调 ;定时准确, 且连续可调等。
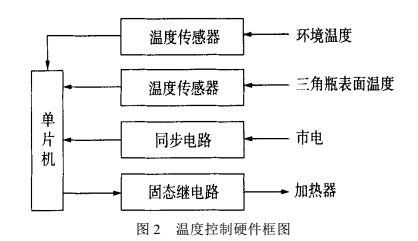
加热器采用时间比率控制 ,调节加热时间的占空比来达到温度稳定的目的。硬件框图如图 2 所示。
 磁力搅拌器
磁力搅拌器单片机通过温度传感器、采样三角瓶表面温度及环境温度, 计算出瓶内液体温度 ,与设定温度比较,经 PID 算法, 计算出控制占空比, 发出控制信号 , 控制固态继电器的开通和关断,**终使液体温度达到稳定。
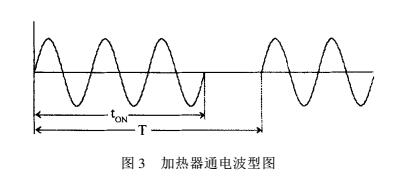
态继电器的开通与市电同步 ,即在电网电压的零点开通以避免对电网的干扰 ,并提高可靠性。加热器通电波形如图 3 所示。

(1)液体本身及加热器具有很大的热惯性, 如果追求快速加热而采用较大的占空比 , 则一旦加热停止 ,温度仍继续上升 ,由于没有冷却措施 ,此时温度失控 ,只能靠自然冷却。
(2)由于测量的是三角瓶表面温度而不是液体实际温度 ,要得到液体温度需要进行校正。
根据上述特点, 采用变系数限幅 PID 控制策略, 不同阶段采用不同的 PID 系数, 同时,对**大占空比进行限幅,达到了满意的控制效果。采样周期 T 等于 N 个正弦波周期 , 单片机对同步信号计数即可得到。第 K 个采样周期内固态继电器导通的正弦波周期数为Nk , 它由 PID 算法产生。Nk 的**大值受限(限幅), 并且其限幅值与环境温度有关。此外,经反复试验得出的温度校正算法如下:
t液 =t环 +a(t瓶 -t环)
校正后得出的液体温度与实际基本吻合 ,误差 ≤±1 ℃。